Research
Research Interests
Robust autonomy in complex environment, Energy-management, etc.
Selected Research Experience as the First Author
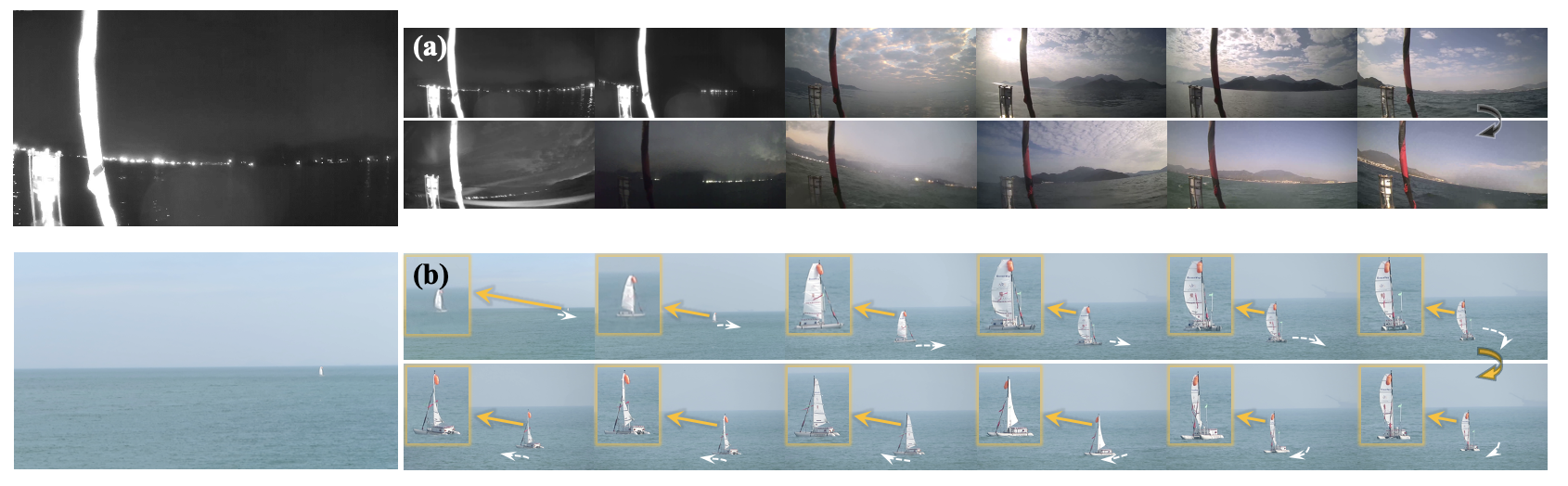
Accepted by T-RO: EeLsT: An Energy-efficient Long-short Term Approach for Sustainable Sailboat Autonomy in Disturbed Marine Environment.
Sailboats are purely wind-driven and thus have great potential in long-term voyaging. For robotic sailboats, constraints in the energy of the control boards, sensors, communication modules, and actuators are crucial for the sustainability of automation. Reducing the control frequency of actuators is crucial for energy conservation. This study proposes an energy-efficient long-short term (EeLsT) approach for sustainable sailing. In EeLsT, long-term and short-term observers are designed to adaptively take control decisions for time-varying environmental influences (e.g., waves and currents). It explicitly leverages the sailing motion characteristics and the dynamic model of the robot considering marine disturbances. In the real marine environment, experiments are conducted with OceanVoy, a catamaran sailing robot. The results show that 27.4% of the energy is saved during stable sailing.
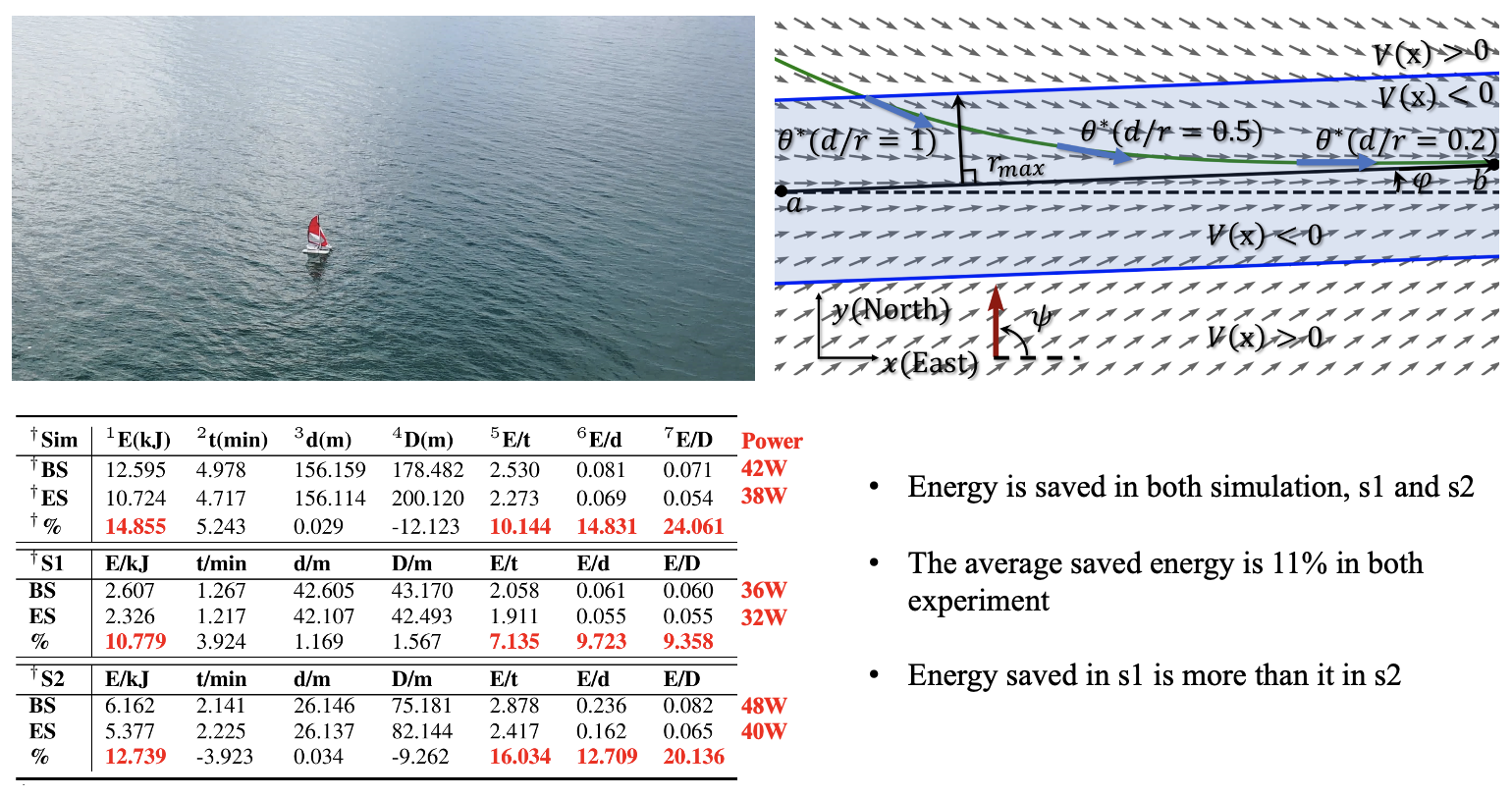
 RA-L: V-stability based Control for Energy-saving towards Long Range Sailing.
Ensuring an adequate supply of energy is a challenge in the development of autonomous sailboats for long-range sailing capability, as the continuous highfrequency execution of control commands leads to high energy consumption. However, as the control of sailboat is much more complex than the other USVs, especially in a complicated and windy environment, simply reducing control frequency will lead to large path tracking error, and even unsuccessful navigation. Based on the V-stability controller of sailboats, this letter proposes an energy-saving (E-saving) control scheme for a sailboat, to enable the energy planning of actuators. While keeping the sailboat traveling within the acceptable range along a desired path, we develop an approach to analyze and reach a satisfying tradeoff between path tracking error and consumed energy. The E-saving method is examined in simulated environments and field experiments using an autonomous sailboat (OceanVoy). The results show that E-saving method reduces energy consumption by approximately 11% compared to that of the previous V-stability controller, indicating that our method can elongate sailing distance.
RA-L: V-stability based Control for Energy-saving towards Long Range Sailing.
Ensuring an adequate supply of energy is a challenge in the development of autonomous sailboats for long-range sailing capability, as the continuous highfrequency execution of control commands leads to high energy consumption. However, as the control of sailboat is much more complex than the other USVs, especially in a complicated and windy environment, simply reducing control frequency will lead to large path tracking error, and even unsuccessful navigation. Based on the V-stability controller of sailboats, this letter proposes an energy-saving (E-saving) control scheme for a sailboat, to enable the energy planning of actuators. While keeping the sailboat traveling within the acceptable range along a desired path, we develop an approach to analyze and reach a satisfying tradeoff between path tracking error and consumed energy. The E-saving method is examined in simulated environments and field experiments using an autonomous sailboat (OceanVoy). The results show that E-saving method reduces energy consumption by approximately 11% compared to that of the previous V-stability controller, indicating that our method can elongate sailing distance.
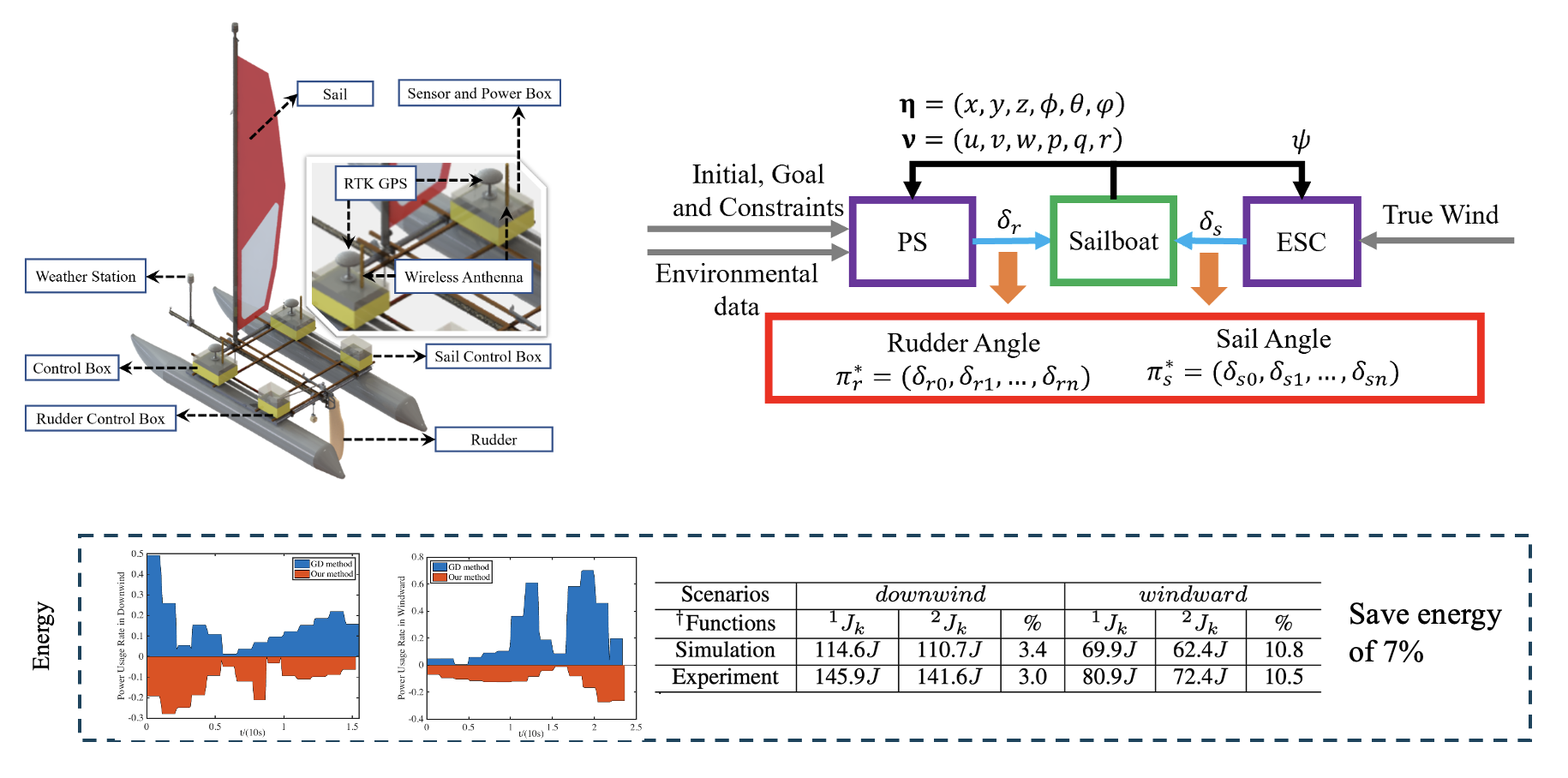
 IROS: OceanVoy: A Hybrid System for Energy Planning in Autonomous Sailboat.
Towards long range and high endurance sailing, energy is of utmost importance. Moreover, benefiting from the dominance of the sailboat itself, it is energy-saving and environment-friendly. Thus, the sailboat with energy planning problem is meaningful. However, until now, the sailboat energy optimization problem has rarely been considered. In this paper, we focus on the energy consumption optimization of an autonomous sailboat. It has been formulated as a Nonlinear Programming problem (NLP). We deal with it with a hybrid control scheme, in which pseudo-spectral (PS) optimal control method is used in heading control, and a model-free framework guided by Extreme Seeking Control (ESC) is used in sail control. The optimal path is generated with the optimal input motor torques in time series. As a result, both simulation and experiments have validated motion planning and energy planning performance. Notably, about 7% of energy is saved on average. Our proposed method can make sailboats sailing longer and sustainable.
IROS: OceanVoy: A Hybrid System for Energy Planning in Autonomous Sailboat.
Towards long range and high endurance sailing, energy is of utmost importance. Moreover, benefiting from the dominance of the sailboat itself, it is energy-saving and environment-friendly. Thus, the sailboat with energy planning problem is meaningful. However, until now, the sailboat energy optimization problem has rarely been considered. In this paper, we focus on the energy consumption optimization of an autonomous sailboat. It has been formulated as a Nonlinear Programming problem (NLP). We deal with it with a hybrid control scheme, in which pseudo-spectral (PS) optimal control method is used in heading control, and a model-free framework guided by Extreme Seeking Control (ESC) is used in sail control. The optimal path is generated with the optimal input motor torques in time series. As a result, both simulation and experiments have validated motion planning and energy planning performance. Notably, about 7% of energy is saved on average. Our proposed method can make sailboats sailing longer and sustainable.
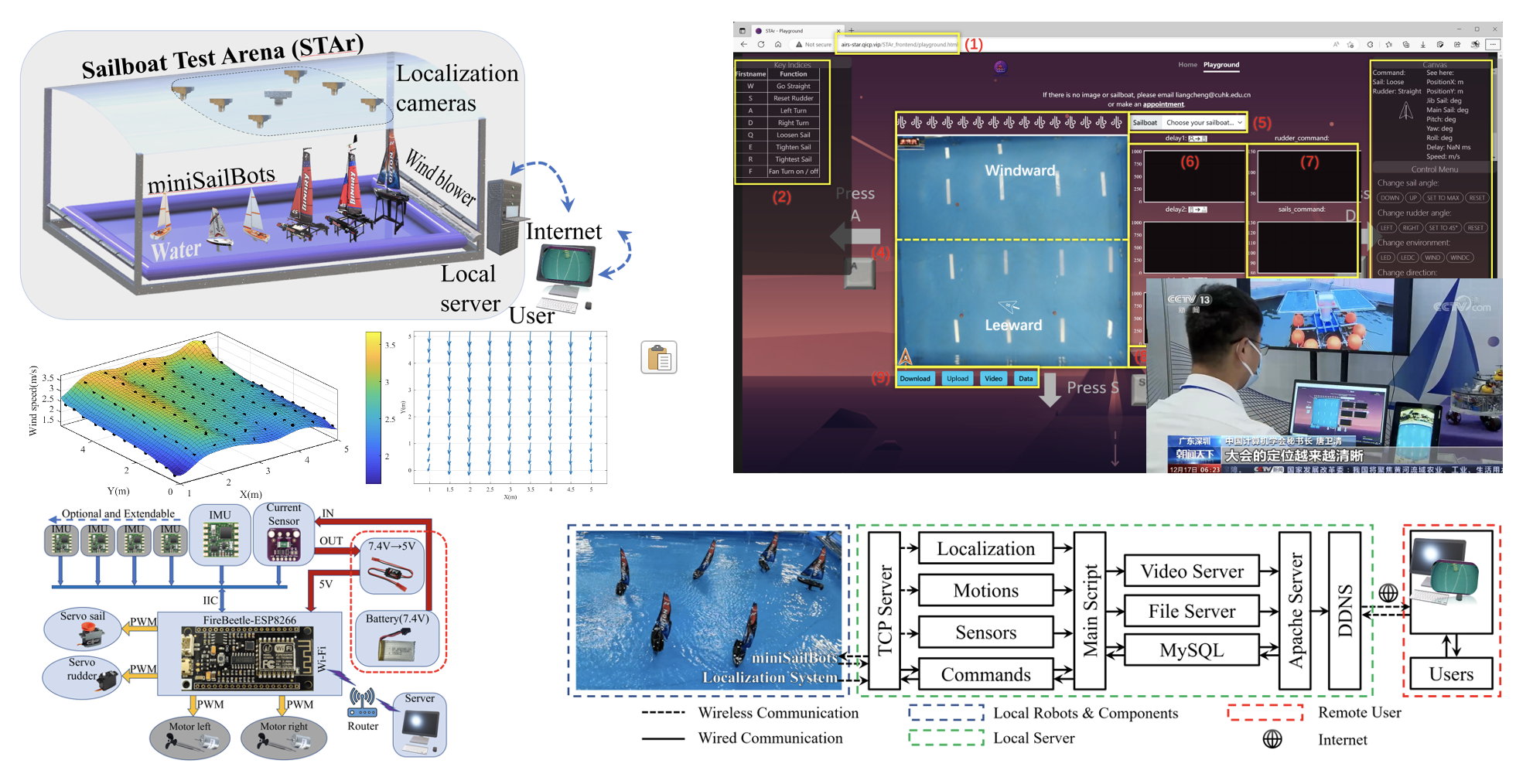
 JMSE: Sailboat Test Arena (STAr): A Remotely Accessible Platform for Robotic Sailboat Research.
Autonomous sailing robots have attracted much attention, but challenges arise due to the sailing tests require an environment with both aerodynamic and hydrodynamic fields and a sufficient number of sailing robots in readiness. A remotely accessible platform with the advantages of low cost, easy operation and high efficiency is the preferred method to solve this dilemma. Consistent with this goal is the design of Sailboat Test Arena (STAr), a remotely accessible platform for sailing robot design verification, autonomous algorithms validation and sailing control practices. All three parts require extensive testing in real water environments. Hereby, for testers around the world, STAr can be accessed without time difference. A variety of local and remote tests have been conducted in the STAr platform at various location around the world. The results show that STAr is a remotely accessible and effective tool in data collection and skill transfer. With continuous adoption and optimization, STAr will continue to serve as a tool to further promote low-cost, high-efficiency and diverse sailing research, and provide opportunities for more people to experience sailing.
JMSE: Sailboat Test Arena (STAr): A Remotely Accessible Platform for Robotic Sailboat Research.
Autonomous sailing robots have attracted much attention, but challenges arise due to the sailing tests require an environment with both aerodynamic and hydrodynamic fields and a sufficient number of sailing robots in readiness. A remotely accessible platform with the advantages of low cost, easy operation and high efficiency is the preferred method to solve this dilemma. Consistent with this goal is the design of Sailboat Test Arena (STAr), a remotely accessible platform for sailing robot design verification, autonomous algorithms validation and sailing control practices. All three parts require extensive testing in real water environments. Hereby, for testers around the world, STAr can be accessed without time difference. A variety of local and remote tests have been conducted in the STAr platform at various location around the world. The results show that STAr is a remotely accessible and effective tool in data collection and skill transfer. With continuous adoption and optimization, STAr will continue to serve as a tool to further promote low-cost, high-efficiency and diverse sailing research, and provide opportunities for more people to experience sailing.
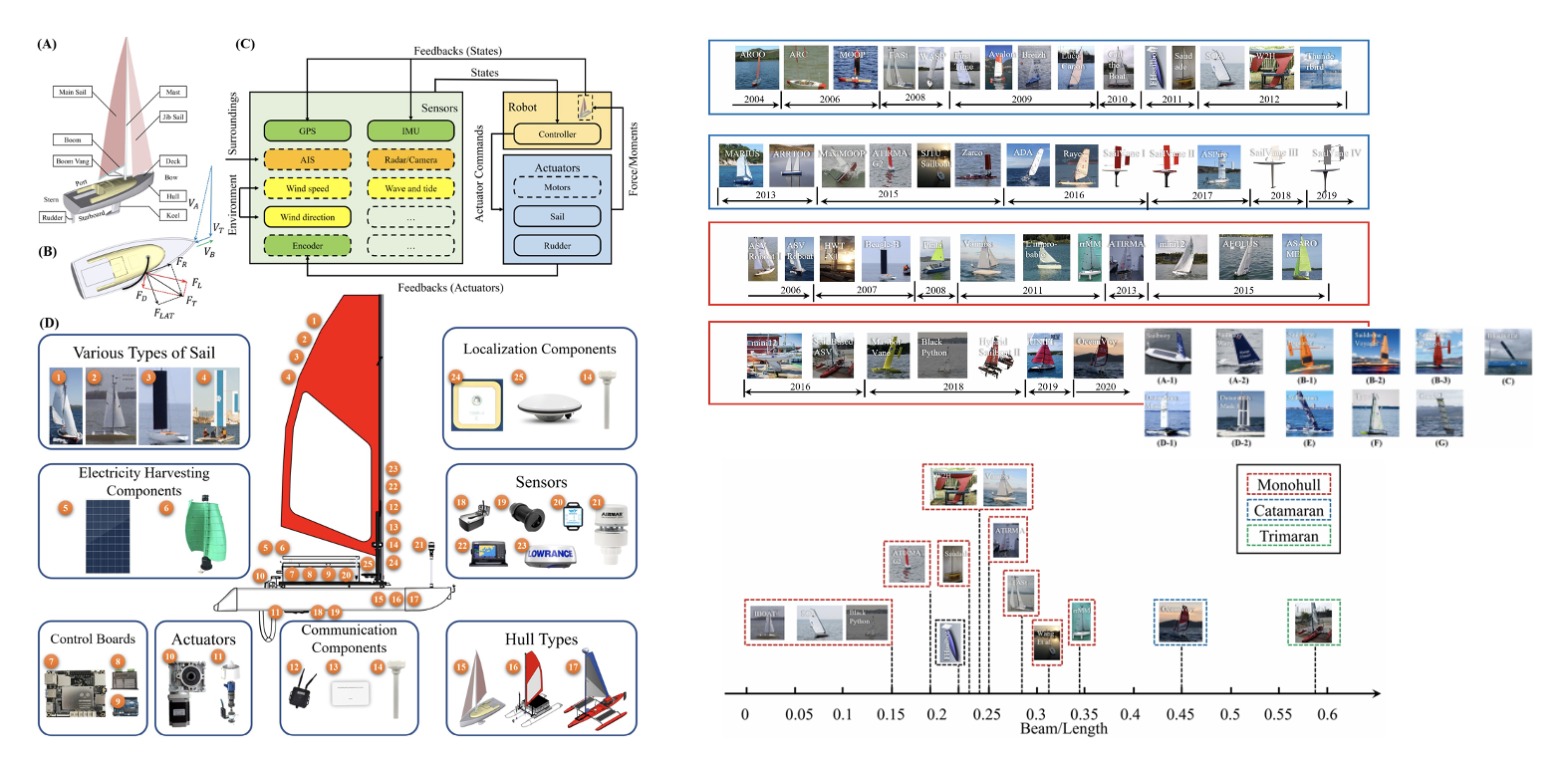
 Frontiers in Robotics and AI: Toward Long-Term Sailing Robots: State of the Art From Energy Perspectives.
Sailing robots can contribute significantly to maritime surface exploration, due to its potential for long-range and long-duration motions in the environment with abundant wind. However, energy, the critical factor for their long-term missions, shall be carefully investigated, so as to achieve sustainability in distance and time. In this survey, we have conducted a comprehensive investigation on numerous sailing robots, developed in academia and industry. Some of them have achieved long-term operation, and some are motivated by, but still on the way to this ambitious goal. Prototypes are grouped in each team, so as to view the development path. We further investigate the existing design and control strategies for energy sufficiency from three perspectives: actuation, harvesting, and energy management. In propulsion and steering, i.e., two major actuations, researchers have accumulated effective sail and rudder designs. The motorized propeller and wave-glider-inspired mechanism also contribute as compliments for propulsion. Electricity harvesting based on solar or wind energies is also discussed to gather more power from nature. Pros and cons in strategies of energy management, which are valuable tools to enhance power utilization efficiency, are elaborated. This article is hoped to provide researchers in long-term robotic sailing with a comprehensive reference from the perspectives of energy.
Frontiers in Robotics and AI: Toward Long-Term Sailing Robots: State of the Art From Energy Perspectives.
Sailing robots can contribute significantly to maritime surface exploration, due to its potential for long-range and long-duration motions in the environment with abundant wind. However, energy, the critical factor for their long-term missions, shall be carefully investigated, so as to achieve sustainability in distance and time. In this survey, we have conducted a comprehensive investigation on numerous sailing robots, developed in academia and industry. Some of them have achieved long-term operation, and some are motivated by, but still on the way to this ambitious goal. Prototypes are grouped in each team, so as to view the development path. We further investigate the existing design and control strategies for energy sufficiency from three perspectives: actuation, harvesting, and energy management. In propulsion and steering, i.e., two major actuations, researchers have accumulated effective sail and rudder designs. The motorized propeller and wave-glider-inspired mechanism also contribute as compliments for propulsion. Electricity harvesting based on solar or wind energies is also discussed to gather more power from nature. Pros and cons in strategies of energy management, which are valuable tools to enhance power utilization efficiency, are elaborated. This article is hoped to provide researchers in long-term robotic sailing with a comprehensive reference from the perspectives of energy.
Publications
[23] Qinbo Sun, Weimin Qi and Huihuan Qian, EeLsT: An Energy-efficient Long-short Term Approach for Sustainable Sailboat Autonomy in Disturbed Marine Environment, IEEE Transactions on Robotics (T-RO), 2025. (Accepted)
[22] Qinbo Sun, Weimin Qi (Co-first author) and Huihuan Qian, “MoWe: Motion Observation for Wind Estimation of Sailing Robots”, Journal of Field Robotics, 2025.
[21] Weimin Qi, Qinbo Sun and Huihuan Qian, A Turning Radius Prediction Scheme for Sailing Robots under Complex Marine Environment, IEEE International Conference on Robotics and Automation (ICRA), 2024.
[20] Qinbo Sun, Weimin Qi (Co-first author), Cheng Liang, Bairun Lin, Francesco Maurelli, Huihuan Qian, “Sailboat Test Arena (STAr): A Remotely Accessible Platform for Robotic Sailboat Research”, Journal of Marine Science and Engineering, Special Issue "New Trends in Marine Robotics: Virtual Experiments and Remote Access", 2023.
[19] Weimin Qi, Qinbo Sun, Yu Cao and Huihuan Qian, Stable Station Keeping of Autonomous Sailing Robots via the Switched Systems Approach for Ocean Observation, IEEE International Conference on Robotics and Automation (ICRA), 2023.
[18] Shuyi Lin, Na Zhang, Qinbo Sun, Weimin Qi and Huihuan Qian, A Simulation and Visualization Platform for Sailing Robots with Application to Marine Area Scanning, IEEE International Conference on Robotics and Biomimetics (ROBIO), 2023.
[17] Na Zhang, Shuyi Lin, Qinbo Sun, Weimin Qi and Huihuan Qian, A Simulated Testing Platform of Sailing Robots: Remote Access with Hololens2, IEEE International Conference on Robotics and Biomimetics (ROBIO), 2023.
[16] Na Zhang, Shuyi Lin, Qinbo Sun, Weimin Qi and Huihuan Qian, A Data-driven Visualization Platform for Sailing Robots, IEEE International Conference on Real-time Computing and Robotics (RCAR), 2023.
[15] Qinbo Sun, Weimin Qi, Hengli Liu, Xiaoqiang Ji and Huihuan Qian, “Toward Long-Term Sailing Robots: State of the Art From Energy Perspectives”, Frontiers in Robotics and AI, 2022.
[14] Xiongwei Lin, Hengli Liu, Qinbo Sun, Xiuhan Li, Huihuan Qian, Zhenglong Sun, Tin Lun Lam, “Applying Project-based Learning in AI and Marine Discipline: an Evaluation Study on a Robotic Sailboat Platform”, IET Cyber-Systems and Robotics, 2022.
[13] Yafeng Wang, Qinbo Sun, Tristan Berger, Weimin Qi, A Drive-through Recharging Strategy for a Quadrotor, IEEE International Conference on Robotics and Automation (ICRA), 2021.
[12] Qinbo Sun, Weimin Qi, Xiaoqiang Ji and Huihuan Qian, “V-stability based Control for Energy-saving towards Long Range Sailing”, IEEE Robotics and Automation Letters (RA-L), 2021.
[11] Weimin Qi, Qinbo Sun, Xiaoqiang Ji, Yiwen Liang, Zhongzhong Cao and Huihuan Qian, “A Kelvin Wake Avoidance Scheme for Autonomous Sailing Robots Based on Orientation-restricted Dubin Path”, IEEE Robotics and Automation Letters (RA-L), 2021.
[10] Weimin Qi, Qinbo Sun, Chongfeng Liu, Xiaoqiang Ji, Zhongzhong Cao, Yiwen Liang and Huihuan Qian, “Collision Risk Assessment and Obstacle Avoidance Control for Autonomous Sailing Robots”, IEEE International Conference on Robotics and Automation (ICRA), 2021.
[9] Yao He, Qinbo Sun, Weimin Qi1, Xiaoqiang Ji and Huihuan Qian, “Computational Efficient Simulation of Kelvin Wake for Unmanned Surface Vehicles”, IEEE International Conference on Real-time Computing and Robotics (RCAR), 2021.
[8] Qinbo Sun, Weimin Qi, Hengli Liu, Zhenglong Sun, Tin Lun Lam and Huihuan Qian, “OceanVoy: A Hybrid System for Energy Planning in Autonomous Sailboat”, IEEE/RSJ, International Conference on Intelligent Robots and Systems (IROS) 2020. (Best Application Paper Finalist Award)
[7] Weimin Qi, Qinbo Sun, Hengli Liu, Zhenglong Sun, Huihuan Qian, Tin Lun Lam, “Collision Avoidance for Autonomous Sailboats Based on RRS Protocol”, IEEE International Conference on Real-time Computing and Robotics (RCAR), 2019. (Best Paper FinalList Award)
[6] Ziyuan Chen, Weimin Qi, Qinbo Sun, Hengli Liu, Ning Ding, Zhenglong Sun, Tin Lun Lam, Huihuan Qian, “Obstacle Avoidance for Autonomous Sailboats via Reinforcement Learning with Coarse-to-fine Strategy”, IEEE, International Conference on Robotics and Biomimetics (ROBIO), 2019. (Best Paper FinalList Award)
[5] Xianggang Yu, Weimin Qi, Qinbo Sun, Hengli Liu, Zhenglong Sun, and Huihuan Qian, “A Low-Cost, Wide-Range and Multi-Functional Vision Backend of SailBoat Research Testbed”, IEEE International Conference on Real-time Computing and Robotics (RCAR), 2019.
[4] Zeyuan Feng, Jiayi Qiu, Hengli Liu, Qinbo Sun, Ning Ding, Zhenglong Sun, Tin Lun Lam, Huihuan Qian, cAn Adaptive Position Keeping Algorithm For Autonomous Sailboats”, IEEE International Conference on Robotics and Biomimetics (ROBIO), 2019.
[3] Ziran Zhang, Zixuan Yao, Qinbo Sun and Huihuan Qian, “Energy optimization of automatic hybrid sailboat”, 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), December 12-15, 2018.
[2] Qinbo Sun, Zhuhan Qiao, Carl Strömbeck, Yang Qu, Hengli Liu, Huihuan Qian, “Tacking Control of an Autonomous Sailboat Based on Force Polar Diagram”, 13th IEEE World Congress on Intelligent Control and Automation (WCICA), 2018: 467-473.
[1] Lingli Yu and Weizhou Wang and Kaijun Zhou and Qinbo Sun, “Mobile robot sensors robust optimal allocation based on improved DPSO”, IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), 2016.
